Other notes in this series from Kevin Kircher’s Distributed Energy Resources class are here.
Summary
This lecture builds on the scalar and vector linear ODEs in DER course - 3 to model Linear Dynamical Systems: “models that describe how a system changes over time, where the relationships between its variables are all linear”, then finishes up with a fun little climate model as practical example.
- A continuous-time linear dynamical system (LDS)
- denotes time
- is the state
- is the action or control
- is the disturbance
- is the dynamics matrix
- is the action matrix or control matrix
- We can use the matrix equivalent of Taylor’s theorem to linearise non-linear
- If we discretise:
- Consider the continuous-time LDS
with piecewise constant - The equivalent discrete-time LDS is:
where denotes
- If the dynamics matrix is invertible
- Consider the continuous-time LDS
Then the fun part: a simple climate model 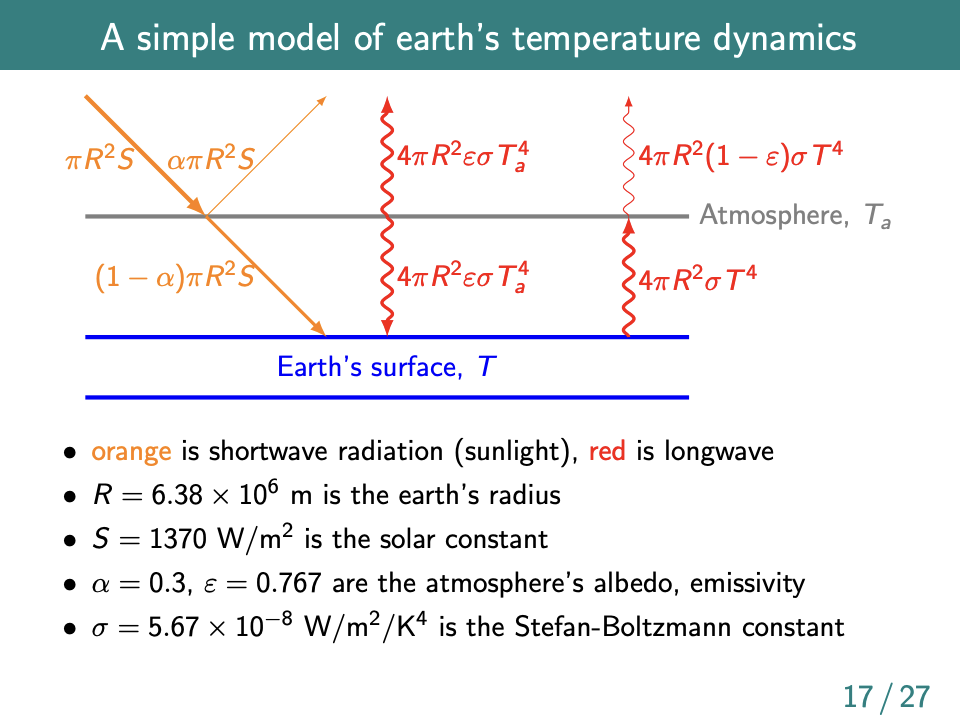 Then we do some neat power-balance calculations and end up with
Then we do some neat power-balance calculations and end up with
- Steady state global average surface temperature:
- Rate of change:
If we plug in historical temperature and ε values then we get reasonably close numbers! See the lecture notes for details.
Notes
Homework
Some simple Python implementation of the above earth climate model. Non-linear and linearised. The hard part was figuring out what the exercise required.
A continuous-time linear dynamical system (LDS)
- denotes time
- is the state
- is the action or control
- is the disturbance
- is the dynamics matrix
- is the action matrix or control matrix
A continuous-time LDS with imperfect observations
is the observation or output
is the noise
is the observation matrix
is the feedthrough matrix
Common simplifications
- time-invariant: , , , and are independent of
- single-input, single-output:
- no feedthrough: for all
- perfectly observed:
- deterministic: and for all
Why do we care about linear things when reality is typically non-linear? Linearity helps with tractability. Can often represent non-linear systems pretty well with linear ones.
For scalars-valued functions, we can linearise with Taylor’s theorem: a mathematical tool that allows us to approximate a function by an infinite sum of terms, where each term is derived from the function’s derivatives at a single point
- The simplified version is:
suppose nonlinear is differentiable at
if is near , then- The full version:
Similarly, can linearise vector-valued functions of vectors with:
suppose nonlinear is differentiable at
if is near , then
where
this is the derivate matrix or Jacobian matrix of atA continuous-time non-linear dynamical system (LDS)
with dynamics function
<skipped derivation>
where
and
For discretised time
- Perfectly observed LDS
- Suppose is piecewise constant:
- Then
- This is just the ODE IVP solution with and
Now assume everything except is piecewise constant:
then
If is invertible, then
Summary for discretising LDS:
- consider the continuous-time LDS
with piecewise constant- The equivalent discrete-time LDS is:
where denotes
- if the dynamics matrix is invertible
- There is no general analytical formula for discretising
with an arbitrary nonlinear dynamics function , but numerical ODE solvers can do the trick